
DeepMind,哈佛造出了 AI「小白鼠」:从觅食,击球窥探神经网络奥秘。人工智能是研究使计算机来模拟人的某些思维过程和智能行为(如学习、推理、思考、规划等)的学科,主要包括计算机实现智能的原理、制造类似于人脑智能的计算机,使计算机能实现更高层次的应用。
人工智能将涉及到计算机科学、心理学、哲学和语言学等学科。可以说几乎是自然科学和社会科学的所有学科,其范围已远远超出了计算机科学的范畴,人工智能与 思维科学的关系是实践和理论的关系,人工智能是处于思维科学的技术应用层次,是它的一个应用分支。我们可以用研究小白鼠的方式来研究 AI 吗?或许可以。在一篇 ICLR 2020 Spotlight 论文中,DeepMind 和哈佛大学的研究者构建了一个基于 AI 的虚拟小鼠,能够执行跑、跳、觅食、击球等多项复杂任务。他们还尝试用神经科学技术来理解这个「人造大脑」如何控制其行为。或许这一成果可以为我们提供人工智能研究的新思路。

人工神经网络算是目前最为先进的人工智能,这是一类由多层神经元互联组件构成的机器学习算法,而「神经元」最早就是来自大脑结构的启发。尽管人工神经网络中的神经元肯定不同于实际人脑中的工作方式,但越来越多的研究者认为,将二者放在一起研究不仅可以帮助我们理解神经科学,还有助于打造出更加智能的 AI。DeepMind 和哈佛大学的研究者就在这一思路上进行了探索。
他们提出的是一种小鼠的 3D 模型,这一模型可在模拟环境中接受神经网络的控制。同时,他们用神经科学技术来分析小鼠的大脑生物活动,由此来理解神经网络如何控制小鼠的行为。该论文目前已被 ICLR 2020 大会接收为 Spotlight 论文。
论文链接:httPS://openreview.net/pdf?id=SyxrxR4KPS
论文作者之一、哈佛大学研究员 Jesse Marshall 表示,这个平台相当于神经科学领域的风洞,可以用不同程度的生物真实性来测试不同的神经网络,以此了解如何面对现实中的复杂挑战。
「在神经科学的典型实验中,研究人员通常会用敲击杠杆之类的单一行为来窥探动物的大脑活动,而大多数机器人也是为了解决定制任务而制造的,比如扫地机器人。这篇文章算是我们研究大脑如何产生并实现灵活性的开端,然后可以按照我们所观察到的结果来设计功能相似的人工智能产品。」
研究过程
构造一只虚拟小鼠
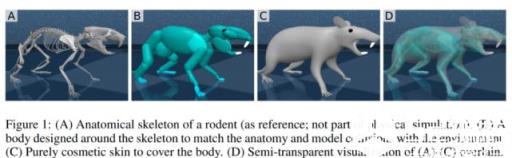
如下图 1 所示,研究者基于实验室小鼠的大小,在 MuJoCo 环境中(Todorov et al 于 2012 年提出)中实现了虚拟的小鼠身体。这个小鼠的可控自由度为 38,它的尾巴、脊柱和脖颈包含多段关节,并由共同驱动多关节的肌腱控制(MuJoCo 中的空间肌腱)。这一虚拟小鼠将作为「dm_control/locomotion/」项目的一部分来开源。
项目地址:https://github.com/deepmind/dm_control/tree/master/dm_control/locomotion
虚拟小鼠可以获得本体感应信息(proprioceptive information)以及来自头戴式摄像头的「原始」、第一人称 RGB 相机(64×64 像素)输入。本体感应信息包括:内部关节角度和角速度、提供驱动的肌腱的位置和速度、从小鼠骨盆到爪子、头部的第一人称向量、类前庭的垂直取向向量、爪子中的接触感应区,以及骨盆的第一人称加速度、速度和 3D 角速度。
训练一个神经网络
近期的研究表明,端到端强化学习可以生成单一的地形自适应策略,基于此,研究者在多个依赖马达控制(motorcontrol)的任务上训练了单一架构,具体如下图 3 所示。

图 3:虚拟小鼠智能体架构。
为了训练一个可以执行所有四项任务的单一策略,研究者使用了用于动作评价结构(actor-critic)DeepRL 的 IMPALA-style 设置,并且通过直立迹(V-Trace)和异策略校正(off-policy correction)对价值函数评价器进行训练。
研究者在实验中发现,在与其他三个任务相关的交叉训练过程中,「逃离丘陵环境」任务的学习更具有挑战性。因此,研究者展示了在「逃离」任务中训练一个单一任务专家以及使用针对该任务的 kick-starting 训练多任务策略的结果,并且得出的系数很弱(.001 或.005)。逃离任务上使用 kick-starting 可以使小鼠更可靠地完成所有四项任务,不同架构的多任务策略之间也能更方便地进行比较。最后生成单个神经网络,该网络利用虚拟输入来决定小鼠的行为方式,并通过协调小鼠的身体来完成各项任务。
让小鼠完成四项任务
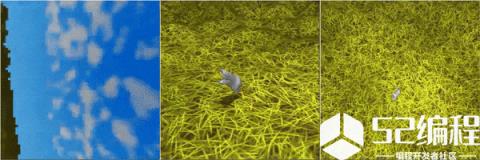
研究者借助训练好的神经网络指导小鼠完成四个动作:跳过多个空隙、在迷宫中觅食、逃离丘陵环境、精确地击球。

奔跑并跃过多个空隙。

觅食动作:追逐蓝色球体。
逃离丘陵。

用前爪精确击球。
分析实验结果
小鼠顺利完成任务之后,研究者结合虚拟小鼠的行为分析它的神经网络活动,以探索它如何完成多项任务(下图 4A)。他们使用了来自神经科学的分析和扰动技术,这一领域已经开发出了一系列探索真实神经网络特性的技术。
研究者记录了虚拟小鼠的运动学、关节、算力、感觉输入以及 LSTM 在核心层和策略层的单元活动。

图 4:虚拟小鼠的行为学记录。
但论文作者之一、哈佛大学研究生Diego Aldarondo表示,他们发现了一个有趣的事情:当神经活动直接控制肌肉力量和腿部动作时,这些活动在比预期更长的时间尺度上出现。
这意味着神经网络似乎可以用一种抽象的符号来代表跑、跳、旋转等多个任务,这是一种先前在啮齿动物和鸣禽动物中都已观察到的认知模式。
研究意义
虽然神经网络不具备生理真实性,但加拿大麦吉尔大学的神经科学家 Blake Richards 说,神经网络捕捉到了神经处理过程中足够多的重要特征,可以针对神经活动如何让影响行为做出有用的预测。他说,这篇论文的最大贡献就是提出了一种近乎真实的方式训练这些网络,使它们更容易与生物数据进行比较。
他还说,作者们正在提供一个平台,用于训练一个真实的生物体和一系列的任务,让与真实的啮齿动物大脑的对比更有意义。
从研究上说,人工神经网络还不适合与生物神经网络进行过于宽泛的比较,但这种方法可能是探索行为的神经基础的一种好方法。
Scott 表示,记录动物行为并将其与特定行为联系起来的复杂程度决定了,大多数实验都是在相对简单的任务中完成的,而且实验的设定非常严格。而相比之下,虚拟小鼠却可以实现非常复杂的、多部分的行为,例如觅食,这些行为可以与它的感官输入和神经活动高度精确地联系起来。
唯一的问题在于,我们难以从动物身上收集任务设定如此复杂的神经数据。Scott 表示,他希望研究人员能在实验室环境中让虚拟小鼠完成更为简单的任务,以使其神经活动模式可以和真实动物中发现的那些进行比较,以便了解它们之间的异同。
从思维观点看,人工智能不仅限于逻辑思维,要考虑形象思维、灵感思维才能促进人工智能的突破性的发展,数学常被认为是多种学科的基础科学,数学也进入语言、思维领域,人工智能学科也必须借用数学工具,数学不仅在标准逻辑、 模糊数学等范围发挥作用,数学进入人工智能学科,它们将互相促进而更快地发展。
免责声明:
① 本站未注明“稿件来源”的信息均来自网络整理。其文字、图片和音视频稿件的所属权归原作者所有。本站收集整理出于非商业性的教育和科研之目的,并不意味着本站赞同其观点或证实其内容的真实性。仅作为临时的测试数据,供内部测试之用。本站并未授权任何人以任何方式主动获取本站任何信息。
② 本站未注明“稿件来源”的临时测试数据将在测试完成后最终做删除处理。有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
软考中级精品资料免费领
 历年真题答案解析
历年真题答案解析 备考技巧名师总结
备考技巧名师总结 高频考点精准押题
高频考点精准押题
- 资料下载
- 历年真题
193.9 KB下载数265
191.63 KB下载数245
143.91 KB下载数1148
183.71 KB下载数642
644.84 KB下载数2756
相关文章
发现更多好内容- Java 中的 exit 方法是否能够终止所有线程?(java exit是否能终止所有线程 )
- Java Supplier 接口如何有效避免空指针问题?(java supplier接口如何避免空指针)
- Java 中如何删除数组中的某个元素?(java怎么删除数组中的某个元素)
- 如何精准地区分 Java 中的重载方法?(如何区分Java中的重载方法)
- Java 中字符串赋值如何赋给另一个变量?(java字符串赋值怎么给另一个变量)
- Java 中静态初始化数组的具体方法有哪些?(Java静态初始化数组的方法是什么)
- Java 拦截器究竟有哪些作用呢?(java拦截器的作用是什么)
- 如何使用 Dockerfile 构建 Java 镜像?(dockerfile如何构建java镜像)
- 如何进行 Java WebService 接口的调用?(java webservice接口调用的方法是什么)
- 掌握PHP数据类型转换的实用技巧
猜你喜欢
AI推送时光机人工智能击球窥探神经网络奥秘
python人工智能算法之人工神经网络怎么使用
python人工智能tensorflow构建循环神经网络RNN
python人工智能tensorflow构建卷积神经网络CNN
人工智能图神经网络权威基准现已开源

python人工智能tensorflow怎么构建循环神经网络RNN
人工智能神经网络之父Hinton再审视34年前的奠基性成果





