本篇内容介绍了“C语言内核使用IO/DPC定时器的方法是什么”的有关知识,在实际案例的操作过程中,不少人都会遇到这样的困境,接下来就让小编带领大家学习一下如何处理这些情况吧!希望大家仔细阅读,能够学有所成!
首先来看IO定时器是如何使用的,IO定时器在使用上需要调用IoInitializeTimer函数对定时器进行初始化,但需要注意的是此函数每个设备对象只能调用一次,当初始化完成后用户可调用IoStartTimer让这个定时器运行,相反的调用IoStopTimer则用于关闭定时。
// 初始化定时器NTSTATUS IoInitializeTimer( [in] PDEVICE_OBJECT DeviceObject, // 设备对象 [in] PIO_TIMER_ROUTINE TimerRoutine, // 回调例程 [in, optional] __drv_aliasesMem PVOID Context // 回调例程参数);// 启动定时器VOID IoStartTimer( [in] PDEVICE_OBJECT DeviceObject // 设备对象);// 关闭定时器VOID IoStopTimer( [in] PDEVICE_OBJECT DeviceObject // 设备对象);这里我们最关心的其实是IoInitializeTimer函数中的第二个参数TimerRoutine该参数用于传递一个自定义回调函数地址,其次由于定时器需要依附于一个设备,所以我们还需要调用IoCreateDevice创建一个新设备来让定时器线程使用,实现定时器代码如下所示。
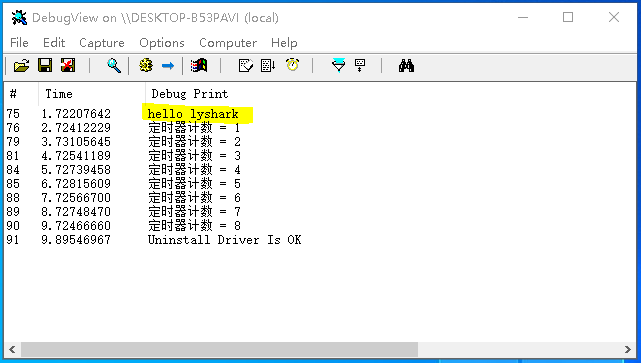
// 署名权// right to sign one's name on a piece of work// PowerBy: LyShark// Email: me@lyshark.com#include <ntifs.h>#include <wdm.h>#include <ntstrsafe.h>LONG count = 0;// 自定义定时器函数VOID MyTimerProcess( __in struct _DEVICE_OBJECT *DeviceObject, __in_opt PVOID Context){InterlockedIncrement(&count);DbgPrint("定时器计数 = %d", count);}VOID UnDriver(PDRIVER_OBJECT driver){// 关闭定时器IoStopTimer(driver->DeviceObject);// 删除设备IoDeleteDevice(driver->DeviceObject);DbgPrint(("Uninstall Driver Is OK \n"));}NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath){DbgPrint("hello lyshark \n");NTSTATUS status = STATUS_UNSUCCESSFUL;// 定义设备名以及定时器UNICODE_STRING dev_name = RTL_CONSTANT_STRING(L"");PDEVICE_OBJECT dev;status = IoCreateDevice(Driver, 0, &dev_name, FILE_DEVICE_UNKNOWN, FILE_DEVICE_SECURE_OPEN, FALSE, &dev);if (!NT_SUCCESS(status)){return STATUS_UNSUCCESSFUL;}else{// 初始化定时器并开启IoInitializeTimer(dev, MyTimerProcess, NULL);IoStartTimer(dev);}Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;}编译并运行这段代码,那么系统会每隔1秒执行一次MyTimerProcess这个自定义函数。
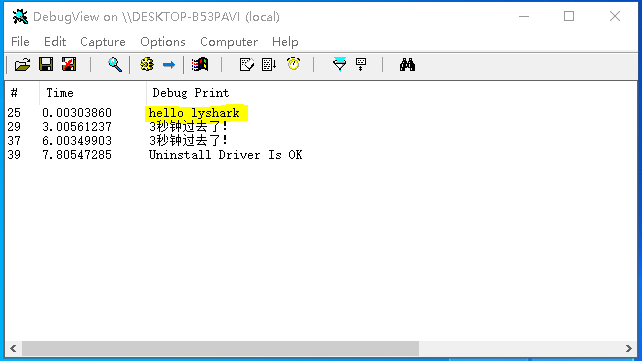
那么如何让其每隔三秒执行一次呢,其实很简单,通过InterlockedDecrement函数实现递减(每次调用递减1)当计数器变为0时InterlockedCompareExchange会让其继续变为3,以此循环即可完成三秒输出一次的效果。
LONG count = 3;// 自定义定时器函数VOID MyTimerProcess(__in struct _DEVICE_OBJECT *DeviceObject, __in_opt PVOID Context){// 递减计数InterlockedDecrement(&count);// 当计数减到0之后继续变为3LONG preCount = InterlockedCompareExchange(&count, 3, 0);//每隔3秒计数器一个循环输出如下信息if (preCount == 0){DbgPrint("[LyShark] 三秒过去了 \n");}}程序运行后,你会看到如下输出效果;
相比于IO定时器来说,DPC定时器则更加灵活,其可对任意间隔时间进行定时,DPC定时器内部使用定时器对象KTIMER,当对定时器设定一个时间间隔后,每隔这段时间操作系统会将一个DPC例程插入DPC队列。当操作系统读取DPC队列时,对应的DPC例程会被执行,此处所说的DPC例程同样表示回调函数。
DPC定时器中我们所需要使用的函数声明部分如下所示;
// 初始化定时器对象 PKTIMER 指向调用方为其提供存储的计时器对象的指针void KeInitializeTimer( [out] PKTIMER Timer // 定时器指针);// 初始化DPC对象void KeInitializeDpc( [out] __drv_aliasesMem PRKDPC Dpc, [in] PKDEFERRED_ROUTINE DeferredRoutine, [in, optional] __drv_aliasesMem PVOID DeferredContext);// 设置定时器BOOLEAN KeSetTimer( [in, out] PKTIMER Timer, // 定时器对象的指针 [in] LARGE_INTEGER DueTime, // 时间间隔 [in, optional] PKDPC Dpc // DPC对象);// 取消定时器BOOLEAN KeCancelTimer( [in, out] PKTIMER unnamedParam1 // 定时器指针);注意;在调用KeSetTimer后,只会触发一次DPC例程。如果想周期的触发DPC例程,需要在DPC例程被触发后,再次调用KeSetTimer函数,应用DPC定时代码如下所示。
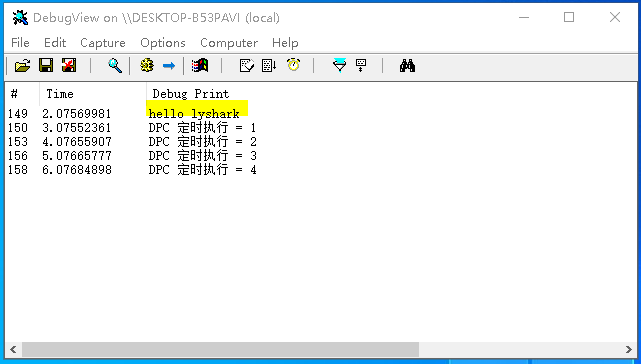
// 署名权// right to sign one's name on a piece of work// PowerBy: LyShark// Email: me@lyshark.com#include <ntifs.h>#include <wdm.h>#include <ntstrsafe.h>LONG count = 0;KTIMER g_ktimer;KDPC g_kdpc;// 自定义定时器函数VOID MyTimerProcess(__in struct _KDPC *Dpc,__in_opt PVOID DeferredContext,__in_opt PVOID SystemArgument1,__in_opt PVOID SystemArgument2){LARGE_INTEGER la_dutime = { 0 };la_dutime.QuadPart = 1000 * 1000 * -10;// 递增计数器InterlockedIncrement(&count);DbgPrint("DPC 定时执行 = %d", count);// 再次设置定时KeSetTimer(&g_ktimer, la_dutime, &g_kdpc);}VOID UnDriver(PDRIVER_OBJECT driver){// 取消计数器KeCancelTimer(&g_ktimer);DbgPrint(("Uninstall Driver Is OK \n"));}NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath){DbgPrint("hello lyshark \n");LARGE_INTEGER la_dutime = { 0 };// 每隔1秒执行一次la_dutime.QuadPart = 1000 * 1000 * -10;// 1.初始化定时器对象KeInitializeTimer(&g_ktimer);// 2.初始化DPC定时器KeInitializeDpc(&g_kdpc, MyTimerProcess, NULL);// 3.设置定时器,开始计时KeSetTimer(&g_ktimer, la_dutime, &g_kdpc);Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;}编译并运行这段程序,会发现其运行后的定时效果与IO定时器并无太大区别,但是DPC可以控制更精细,通过la_dutime.QuadPart = 1000 * 1000 * -10毫秒级别都可被控制。
最后扩展一个知识点,如何得到系统的当前详细时间,获得系统时间。在内核里通过KeQuerySystemTime获取的系统时间是标准时间(GMT+0),转换成本地时间还需使用RtlTimeToTimeFields函数将其转换为TIME_FIELDS结构体格式。
// 署名权// right to sign one's name on a piece of work// PowerBy: LyShark// Email: me@lyshark.com#include <ntifs.h>#include <wdm.h>#include <ntstrsafe.h>// 内核中获取时间VOID MyGetCurrentTime(){LARGE_INTEGER CurrentTime;LARGE_INTEGER LocalTime;TIME_FIELDS TimeFiled;// 得到格林威治时间KeQuerySystemTime(&CurrentTime);// 转成本地时间ExSystemTimeToLocalTime(&CurrentTime, &LocalTime);// 转换为TIME_FIELDS格式RtlTimeToTimeFields(&LocalTime, &TimeFiled);DbgPrint("[时间与日期] %4d年%2d月%2d日 %2d时%2d分%2d秒",TimeFiled.Year, TimeFiled.Month, TimeFiled.Day,TimeFiled.Hour, TimeFiled.Minute, TimeFiled.Second);}VOID UnDriver(PDRIVER_OBJECT driver){DbgPrint(("Uninstall Driver Is OK \n"));}NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath){MyGetCurrentTime();DbgPrint("hello lyshark \n");Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;}运行后即可在内核中得到当前系统的具体时间;

“C语言内核使用IO/DPC定时器的方法是什么”的内容就介绍到这里了,感谢大家的阅读。如果想了解更多行业相关的知识可以关注编程网网站,小编将为大家输出更多高质量的实用文章!