
小编给大家分享一下Python+OpenCV内置方法如何实现行人检测,相信大部分人都还不怎么了解,因此分享这篇文章给大家参考一下,希望大家阅读完这篇文章后大有收获,下面让我们一起去了解一下吧!
您是否知道 OpenCV 具有执行行人检测的内置方法?
OpenCV 附带一个预训练的 HOG + 线性 SVM 模型,可用于在图像和视频流中执行行人检测。
今天我们使用Opencv自带的模型实现对视频流中的行人检测,只需打开一个新文件,将其命名为 detect.py ,然后加入代码:
# import the necessary packagesfrom __future__ import print_functionimport numpy as npimport argparseimport cv2import os导入需要的包,然后定义项目需要的方法。
def nms(boxes, probs=None, overlapThresh=0.3): # if there are no boxes, return an empty list if len(boxes) == 0: return [] # if the bounding boxes are integers, convert them to floats -- this # is important since we'll be doing a bunch of divisions if boxes.dtype.kind == "i": boxes = boxes.astype("float") # initialize the list of picked indexes pick = [] # grab the coordinates of the bounding boxes x1 = boxes[:, 0] y1 = boxes[:, 1] x2 = boxes[:, 2] y2 = boxes[:, 3] # compute the area of the bounding boxes and grab the indexes to sort # (in the case that no probabilities are provided, simply sort on the # bottom-left y-coordinate) area = (x2 - x1 + 1) * (y2 - y1 + 1) idxs = y2 # if probabilities are provided, sort on them instead if probs is not None: idxs = probs # sort the indexes idxs = np.argsort(idxs) # keep looping while some indexes still remain in the indexes list while len(idxs) > 0: # grab the last index in the indexes list and add the index value # to the list of picked indexes last = len(idxs) - 1 i = idxs[last] pick.append(i) # find the largest (x, y) coordinates for the start of the bounding # box and the smallest (x, y) coordinates for the end of the bounding # box xx1 = np.maximum(x1[i], x1[idxs[:last]]) yy1 = np.maximum(y1[i], y1[idxs[:last]]) xx2 = np.minimum(x2[i], x2[idxs[:last]]) yy2 = np.minimum(y2[i], y2[idxs[:last]]) # compute the width and height of the bounding box w = np.maximum(0, xx2 - xx1 + 1) h = np.maximum(0, yy2 - yy1 + 1) # compute the ratio of overlap overlap = (w * h) / area[idxs[:last]] # delete all indexes from the index list that have overlap greater # than the provided overlap threshold idxs = np.delete(idxs, np.concatenate(([last], np.where(overlap > overlapThresh)[0]))) # return only the bounding boxes that were picked return boxes[pick].astype("int")image_types = (".jpg", ".jpeg", ".png", ".bmp", ".tif", ".tiff")def list_images(basePath, contains=None): # return the set of files that are valid return list_files(basePath, validExts=image_types, contains=contains)def list_files(basePath, validExts=None, contains=None): # loop over the directory structure for (rootDir, dirNames, filenames) in os.walk(basePath): # loop over the filenames in the current directory for filename in filenames: # if the contains string is not none and the filename does not contain # the supplied string, then ignore the file if contains is not None and filename.find(contains) == -1: continue # determine the file extension of the current file ext = filename[filename.rfind("."):].lower() # check to see if the file is an image and should be processed if validExts is None or ext.endswith(validExts): # construct the path to the image and yield it imagePath = os.path.join(rootDir, filename) yield imagePathdef resize(image, width=None, height=None, inter=cv2.INTER_AREA): dim = None (h, w) = image.shape[:2] # 如果高和宽为None则直接返回 if width is None and height is None: return image # 检查宽是否是None if width is None: # 计算高度的比例并并按照比例计算宽度 r = height / float(h) dim = (int(w * r), height) # 高为None else: # 计算宽度比例,并计算高度 r = width / float(w) dim = (width, int(h * r)) resized = cv2.resize(image, dim, interpolation=inter) # return the resized image return resizednms函数:非极大值抑制。
list_images:读取图片。
resize:等比例改变大小。
# construct the argument parse and parse the argumentsap = argparse.ArgumentParser()ap.add_argument("-i", "--images", default='test1', help="path to images directory")args = vars(ap.parse_args())# 初始化 HOG 描述符/人物检测器hog = cv2.HOGDescriptor()hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())定义输入图片的文件夹路径。
初始化HOG检测器。
# loop over the image pathsfor imagePath in list_images(args["images"]): # 加载图像并调整其大小以 # (1)减少检测时间 # (2)提高检测精度 image = cv2.imread(imagePath) image = resize(image, width=min(400, image.shape[1])) orig = image.copy() print(image) # detect people in the image (rects, weights) = hog.detectMultiScale(image, winStride=(4, 4), padding=(8, 8), scale=1.05) # draw the original bounding boxes print(rects) for (x, y, w, h) in rects: cv2.rectangle(orig, (x, y), (x + w, y + h), (0, 0, 255), 2) # 使用相当大的重叠阈值对边界框应用非极大值抑制,以尝试保持仍然是人的重叠框 rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects]) pick = nms(rects, probs=None, overlapThresh=0.65) # draw the final bounding boxes for (xA, yA, xB, yB) in pick: cv2.rectangle(image, (xA, yA), (xB, yB), (0, 255, 0), 2) # show some information on the number of bounding boxes filename = imagePath[imagePath.rfind("/") + 1:] print("[INFO] {}: {} original boxes, {} after suppression".format( filename, len(rects), len(pick))) # show the output images cv2.imshow("Before NMS", orig) cv2.imshow("After NMS", image) cv2.waitKey(0)遍历 --images 目录中的图像。
然后,将图像调整为最大宽度为 400 像素。尝试减少图像尺寸的原因有两个:
减小图像大小可确保需要评估图像金字塔中的滑动窗口更少(即从线性 SVM 中提取 HOG 特征,然后将其传递给线性 SVM),从而减少检测时间(并提高整体检测吞吐量)。
调整我们的图像大小也提高了我们行人检测的整体准确性(即更少的误报)。
通过调用 hog 描述符的 detectMultiScale 方法,检测图像中的行人。 detectMultiScale 方法构造了一个比例为1.05 的图像金字塔,滑动窗口步长分别为x 和y 方向的(4, 4) 个像素。
滑动窗口的大小固定为 64 x 128 像素,正如开创性的 Dalal 和 Triggs 论文《用于人体检测的定向梯度直方图》所建议的那样。 detectMultiScale 函数返回 rects 的 2 元组,或图像中每个人的边界框 (x, y) 坐标和 weights ,SVM 为每次检测返回的置信度值。
较大的尺度大小将评估图像金字塔中的较少层,这可以使算法运行得更快。然而,规模太大(即图像金字塔中的层数较少)会导致行人无法被检测到。同样,过小的比例尺会显着增加需要评估的图像金字塔层的数量。这不仅会造成计算上的浪费,还会显着增加行人检测器检测到的误报数量。也就是说,在执行行人检测时,比例是要调整的最重要的参数之一。我将在以后的博客文章中对每个参数进行更彻底的审查以检测到多尺度。
获取初始边界框并将它们绘制在图像上。
但是,对于某些图像,您会注意到每个人检测到多个重叠的边界框。
在这种情况下,我们有两个选择。我们可以检测一个边界框是否完全包含在另一个边界框内。或者我们可以应用非最大值抑制并抑制与重要阈值重叠的边界框。
应用非极大值抑制后,得到最终的边界框,然后输出图像。
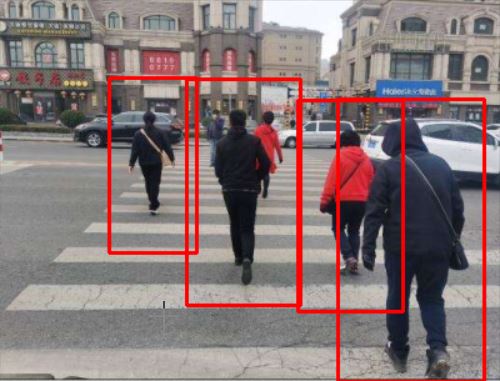
运行结果:
nms前:
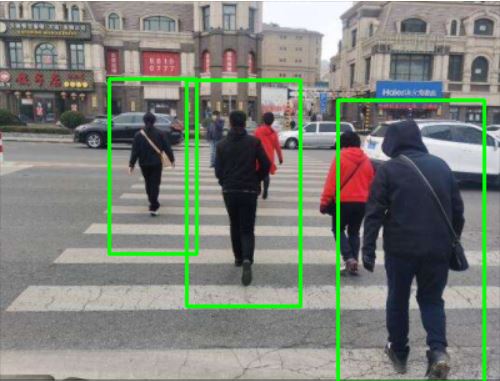
nms后:
以上是“Python+OpenCV内置方法如何实现行人检测”这篇文章的所有内容,感谢各位的阅读!相信大家都有了一定的了解,希望分享的内容对大家有所帮助,如果还想学习更多知识,欢迎关注编程网行业资讯频道!







